
Snabb eller långsam? Hur bedömer man en segelbåts prestanda?






Med några enkla nyckeltal kan man få en god indikation på en segelbåts fartpotential och säkerhetsegenskaper. Har du tillgång till segelbåtens specifikation är det lätt att göra en första bedömning. I många fall tillhandahålls ett polardiagram av konstruktören. Men hur tas det fram och hur tolkar man diagrammet? I den här artikeln förklarar Lars Larsson, Professor i Hydrodynamik vid Chalmers, grunderna i hur man teoretiskt bedömer en segelbåts egenskaper vad gäller prestanda och säkerhet.

SNABB ELLER LÅNGSAM?
HUR BEDÖMER MAN EN SEGELBÅTS PRESTANDA?
Önskar man en mer detaljerad information kan man utföra beräkningar med hjälp av dator och ett ”Velocity Prediction Program” (VPP) som utför relativt enkla beräkningar baserade på empiriska relationer för samtliga hydrodynamiska och aerodynamiska krafter och moment. Beräkningarna resulterar i båtens fart, krängning och avdrift för alla vindhastigheter och riktningar av intresse.
På den mest avancerade nivån hittar vi experimentella undersökningar i vindtunnlar och släprännor samt numeriska beräkningar baserade på ”Computational Fluid Dynamics” (CFD). Den här typen av undersökningar är dyra att genomföra och utnyttjas främst i projekt med stora budgetar som Volvo Ocean Race och America’s Cup.
I den här artikeln fokuserar vi på den enklare metoden, som vi lätt kan använda oss av på egen hand. Vi kommer också att kort introducera hur VPP fungerar och vad man kan få ut av beräkningarna.
Bedömning baserad på nyckeltal
I lätt vind och låga hastigheter är den viktigaste motstånds-komponenten det viskösa motståndet. Detta orsakas av friktionen mellan undervattenskroppen och vattnet och är proportionellt mot den våta ytan, SW. För att bedöma en segelbåts fartpotential bör motståndet jämföras med drivkraften som genereras av seglen. Denna kraft är proportionell mot segelarean, SA. Kvoten mellan segelarean och den våta ytan, SA/SW, är ett nyckeltal som indikerar om båten är snabb eller inte. En någorlunda snabb segelbåt bör ha ett värde på åtminstone 2,0. Snabba prestandabåtar har ett nyckeltal på 2,5 eller mer. Notera att segelarean är den triangulära arean. Storseglet räknas som en triangel och till den läggs förtriangeln (triangeln mellan förstag, mast och däck).
Båtens egenskaper vid höga hastigheter är viktigare i frisk vind. I årets andra artikel (#2) såg vi att de flesta familjebåtar har en maxhastighet, den så kallade skrovfarten, som bestäms av båtens vattenlinjelängd. För att en båt skall kunna gå snabbare än sin skrovfart krävs att skrovet är tillräckligt lätt. Fartpotentialen i frisk vind kan därför bedömas med hjälp av längd-deplacementsförhållandet L/m1/3, där L är vattenlinjelängden och m är båtens deplacement (vikt eller massa) i ton.
En båt med ett längd-deplacementsförhållande på minst 5,7 har potential att gå fortare än skrovfarten. Det kräver en ganska lätt båt. På papperet klarar rätt så många moderna båtar detta, men ett varningens ord kan vara på plats. Det deplacement som anges i båtens specifikation är ofta betydligt mindre än det verkliga. Skillnader på över 10% är vanliga. En anledning är att produktionstekniken inte är exakt. Man lägger på mer plast än specificerat, ”för säkerhets skull”. Ibland används tyngre material än konstruktören tänkt sig för att hålla nere kostnaderna. Dessutom fylls båten med en mängd utrustning som oftast inte är med i specifikationen. Den vikt som konstruktören anger gäller vanligen för en tom båt i sin mest basala version.
Ett annat nyckeltal som ofta används för att bedöma en båts fartpotential är kvoten mellan segelarean och deplacementet, SA/m2/3. Egentligen är detta ett mått på accelerationen då kvoten anger drivkraft relativt massa, men det säger också mycket om segelbåtens fartpotential i ett mellanvindsregister. Kvoten bör ligga över 15 för rimlig snabbhet. Prestandabåtar har värden mellan 25 och 30.
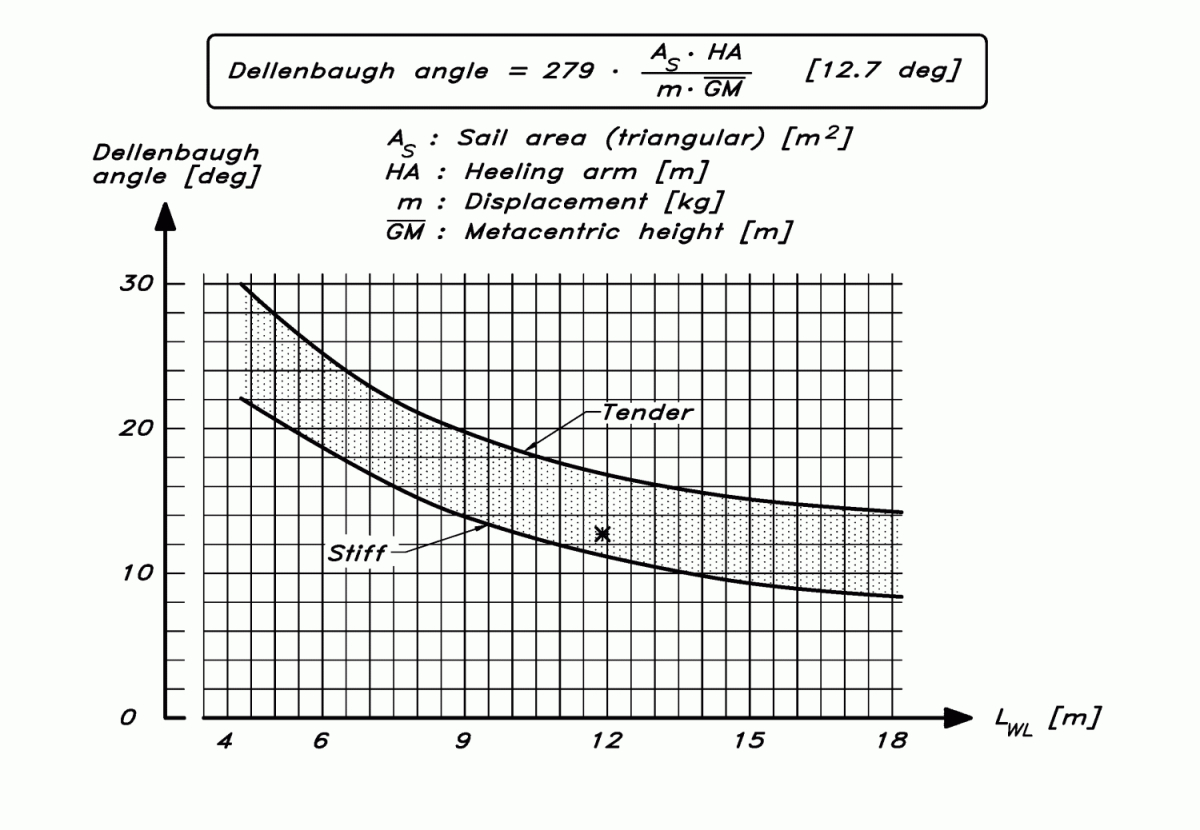
I föregående artikel (#4) såg vi att rätande momentet under normala seglingsförhållanden bestäms av metacenterhöjden, GM, och deplacementet, m. Det krängande momentet är proportionellt mot segelytan och den krängande hävarmen, HA. Hävarmen är avståndet mellan segelkraften, som trycker båten åt lä, och den hydrodynamiska kraften på undervattenskroppen (framförallt kölen) som håller emot.
Man kan för enkelhets skull anta att den hydrodynamiska kraften verkar på 45% av djupgåendet, men segelkraftens höjd är lite svårare att bestämma. Anta att storen är triangulär och att förseglet representeras av förtriangeln. I båda trianglarna ligger geometriska tyngdpunkten på en tredjedel av höjden över basen. Höjden över vattenytan kan lätt mätas om man ritar in punkterna i en segelritning. Vi får då två höjder och den gemensamma tyngdpunktens höjd blir ett viktat medelvärde av dessa. Om storen utgör 60% av den totala arean multipliceras dess höjd med 0,6 och förtriangelns höjd med 0,4 och summan ger gemensamma höjden.
Effekten av de krängande- och rätande momenten kan bedömas genom den så kallade “Dellenbaughvinkeln”. Denna beräknas enligt Figur 1 och är tänkt att representera båtens krängning på kryss i mellanvind. Som framgår av figuren så minskar vinkeln med båtstorleken. De flesta båtar ligger mellan de två linjerna. En segelbåt med en Dellenbaughvinkel nära den undre linjen är styv, medan en nära den övre linjen är vek.
.")
Figur 1. Dellenbaughvinkeln (notera att segelarean anges som AS i figuren).
En segelbåts Dellenbaughvinkel säger ingenting om dess stabilitet vid så stora krängningsvinklar att det är risk för säkerheten. För att göra en säkerhetsbedömning krävs att man har tillgång till hela stabilitetskurvan. Den används då tillsammans med ett antal andra båtdata för att beräkna ett stabilitetsindex, “STIX”. Alla segelbåtar sålda inom EU måste ha ett STIX-värde. De klassificeras baserat på detta i kategorierna A: ”Ocean”, B: ”Offshore”, C: ”Coastal” och D: ”Local”. Ju högre kategori desto större STIX-värde. Ekvationerna finns beskrivna i detalj i ISO-standarden 12217-2 som gäller för segelbåtar på mellan 6 och 24 meter. De finns också i boken “Principles of Yacht Design” som nämns i slutet av artikeln.
VPP-program
VPP-program började dyka upp på 1970-talet och har sedan dess utvecklats till ett mycket viktigt verktyg inom yacht-design. Snabbt och effektivt kan man undersöka effekten av en parameterändring (längd, bredd, djup, vikt, segelplan et c) vilket påskyndar arbetet mot en optimal design avsevärt. Nackdelen är att dessa enkla program inte klarar av att utvärdera lokala förändringar som en ändring av skrovytans krökning. För detta krävs mer exakta metoder, som CFD.
Det mest kända VPP-programmet, WinDesign, har utvecklats av Wolfson Unit vid Southampton University. Programmet går att leasa men är relativt dyrt. Ett annat vanligt förekommande program, som också går att leasa, är Ocean Racing Councils VPP (ORC VPP) som används av ORC för handikappberäkning. Det finns också gratisprogram på webben men av mer tveksam kvalitet.
Ett VPP är i grunden ett datorprogram som löser minst tre ekvationer:
1. Seglens drivkraft = Totala motståndet
2. Seglens sidkraft = Sidkraften från undervattenskroppen
3. Seglens krängande moment = Rätande momentet från
undervattenskroppen
Ibland lägger man till ytterligare ekvationer såsom gir-ekvationen som behövs om man är intresserad av att optimera rodervinkeln.

Figur 2. Schematisk bild av ett VPP-program.
Figur 2 är en schematisk bild av ett VPP. Kärnan är en “ekvationslösare”, det vill säga själva programmet som löser de tre ekvationerna. För att kunna genomföra beräkningen behövs tre typer av indata: hydrodynamiken för skrovet, aerodynamiken för segel och rigg samt hydrostatiken för skrovet (det rätande momentet). Den enklaste indatan är den hydrostatiska som nästan alltid beräknas i ett CAD-program. I VPP-programmens enklaste form kommer hydrodynamiska och aerodynamiska indata från empiriska relationer. Ofta tas hydrodynamiska indata från Universitetet i Delft där man under 40 år har genomfört en serie systematiska tester kända som Delft Systematic Yacht Hull Series, DSYHS. Över 50 segelbåtar har testats och relationer för alla motståndskomponenter finns tillgängliga i litteraturen, t ex i ”Principles of Yacht Design”. Segelkrafter tas ofta från en modell framtagen av George Hazen vid Massachusetts Institute of Technology (MIT) på 1980-talet.
Som vi kan se i figuren accepterar de mer avancerade VPP-programmen också hydrodynamiska och aerodynamiska indata från externa källor. Sådana källor är vindtunnlar och släprännor samt CFD. Har man tillgång till denna typ av data kan man göra väldigt detaljerade studier. Det är faktiskt också så att utan VPP är det omöjligt att utvärdera avancerade mätningar eller CFD-beräkningar. Varje mätt förändring, t ex en motståndsminskning på grund av en skrovförändring, måste omsättas i en fartförändring. Detta kan bara göras med VPP.
Figur 3 visar ett flödesschema för ett grundläggande VPP. Vid startpunkten anges vindstyrka och -riktning relativt båtens kurs. Notera att detta är sann vind, det vill säga den vind som blåser mot ett stationärt mål på vattnet. Den sanna vinden skiljer sig från den skenbara, som man känner ombord, på grund av att

Figur 3. VPP flödesschema.
båten rör på sig genom luften. För att få skenbar vind måste man först gissa båtens hastighet. Därefter gissar man krängningsvinkeln, varefter segelkrafterna kan beräknas. Dessa ger det krängande momentet och programmet anpassar krängningsvinkeln så att det rätande momentet blir lika stort (ekvation 3). Den nya krängningsvinkeln är sannolikt inte densamma som antogs tidigare, vilket innebär att man går tillbaka och gör om beräkningarna med den nya vinkeln. Detta fortsätter tills vinkeln inte ändrar sig längre. Denna loop i programmet har då konvergerat.
Därefter beräknas båtens hastighet så att motståndet blir lika med den drivande kraften får seglen (ekvation 1). Troligen skiljer sig denna hastighet från den tidigare antagna, så man får gå tillbaka och börja om med den nya hastigheten. Detta repeteras tills hastigheten inte ändras. Då har även hastighetsloopen konvergerat.
Nu kan vi beräkna avdriften från ekvation 2. Vi känner sidkraften från seglen och justerar avdriften så att den aerodynamiska sidkraften balanserar den hydrodynamiska. Notera att det inte krävs en loop för detta. Korrekt avdrift kan beräknas direkt om man känner till kränging och hastighet.
Hela proceduren upprepas tills vi har resultaten för alla vindhastigheter och vindriktningar av intresse. Det låter kanske komplicerat men med en modern dator tar det bara några sekunder.
Polarkurvan
Utdata från VPP är hastighet, kränging och avdrift. Den överlägset mest intressanta kvantiteten är hastigheten som kan visualiseras i ett polardiagram, se Figur 4. Här antas den sanna vinden blåsa rakt nedåt och segelbåten seglar i olika riktningar relativt vinden. I figuren visas båtens hastighet i en riktning med en pil. Pilens längd representerar hastigheten. Om vi ritar pilen för ett stort antal riktningar kommer pilens spets att följa kurvans innersta linje som gäller för en sann vindstyrka på 3 m/s. När vinden ökar, ökar också båtfarten. Det finns en kurva för varje vindhastighet från 3m/s till 10m/s.

Figur 4. Polardagram för en 41 fot performance cruiser.
Av särskilt intresse är den högsta punkten på varje kurva. Den är markerad med en liten cirkel. Här är båtens hastighetskomponent rakt mot vinden (”Velocity Made Good”, VMG) som högst. För att nå kryssmärket så snart som möjligt bör båten seglas i den riktning som anges av cirkeln. Motsvarande punkt på undanvind är den lägsta punkten på kurvan. I denna punkt är båtens hastighet som högst mot lämärket (det vill säga maximalt negativt VMG). Figuren visar att vid små vindstyrkor bör båten seglas i 135 grader, inte 180, som representerar platt läns. Den här informationen är väldigt värdefull då det kan vara svårt att avgöra vilken riktning som är bäst på undanvind. Det är lättare att hitta den optimala riktningen på kryss, speciellt för en erfaren rorsman.
Kurvorna i figuren är inte helt släta. De består av tre delar som var och en representerar en viss segelsättning. För mindre vindvinklar används krysstället. När vinklarna blir stora nog sätter man gennakern och till slut, vid riktigt stora vinklar, sätter man spinnakern. Programmet hittar automatiskt vilken segelsättning som är optimal och kan ge råd till skepparen.
Lär dig mer
Det här är femte artikeln i serien om teorierna bakom design och konstruktion av segelbåtar. Tidigare har vi bekantat oss med båtens motstånd i vattnet (#1 och #2 2015) och diskuterat optimering av en segelbåts akterskepp (#3 2015). I den fjärde artikeln (#4 2015) tittade vi närmare på båtens stabilitet.
Vill du lära dig mer kan du skaffa boken ”Principles of Yacht Design” (Fjärde upplagan, 2014) av Lars Larsson, Rolf E Eliasson och Michal Orych. En kurs baserad på boken kommer att hållas i Stockholm och Göteborg vintern 2016. Besök www.isyd.org för mer information.
Text: Professor Lars Larsson
Fritt översatt: Anna-Lena Elled
Vi tackar förlaget Adlard Coles Nautical, London, för möjligheten att publicera Figurerna 1, 3 och 4 som är tagna ur boken ”Principles of Yacht Design”.
Lars Larsson artiklar om teorierna bakom design och konstruktion av segelbåtar:
#1 Skrovlig eller slät yta – spelar det någon roll?
#2 Varför är en lång båt snabbare än en kort?
#3 Brett och platt akterskepp – ett lyckat koncept – eller inte?
#4 Varför är stora båtar slankare än små?
#5 Snabb eller långsam? Hur bedömer man en segelbåts prestanda?























